02 · EXHIBITION · BRAND SPACE
2022.6 · 大三下
DJI 零重力
浮空之城
年份
2022.6 · 大三下
角色
Exhibition Designer
署名
个人独立
贡献
个人独立完成
指导老师
尚慧芳
(A) 摘要
以「零重力」扣住大疆「突破引力、突破产品边界」的气质,又以「浮空之城」作副题,把抽象主题落到可步入的城市想象。张拉膜展馆由双圆锥阵列、折纸式分割与边缘力学张拉迭代塑形;观众在单一连续动线里沿类 FPV 的路径折返穿行,把曾只属于飞行器与极客的城市视角,开放给更日常的观看。
(W) 漫游影像
(B) 媒介 · 工具
媒介
- 展示设计
- 张拉膜结构
- 力学模拟
工具
- Rhino
- Grasshopper
- ISOVIST
- D5 Render
- Premiere
贡献
- 策展概念 · 100%
- 空间形态 · 100%
- 参数化结构 · 100%
- 效果图 · 100%
- 影像漫游 · 100%
- 图册排版 · 100%
(C01) 主题
主题
「零重力」在理念与产品形态上都很贴切:既指无人机挣脱地心引力的技术命题,也呼应极致求真、突破边界的企业气质。副题「浮空之城」把主题说透一层,又用城市尺度把参观人群拉进叙事。它还与「天空之城」、自然遗产数字化等方向在自然探索上形成联想——当技术走向成熟,展览的引力也可以把更多普通人带进无人机的使用语境。
(C02) 形态生成
形态生成
以双圆锥体为母题:先置入单体强调漂浮感,再阵列化丰富空间;通过张拉对周边进行主体体量的控制与生成。继而对圆锥做分割与「折纸」式操作,再对边缘施加力学张拉,经多轮力学模拟收敛为最终的膜结构形态,使生成步骤本身成为可读的设计说明。
(C03) 动线
动线
不设上下分层的双步道。在张拉膜围合的空间里组织一条可折返的连续路径,借 FPV 镜头语言编排起伏与视线反转,让观众在步行中短暂获得接近飞行器的城市观看角度。配合 ISOVIST 进行视域分析与空间句法测算,验证关键节点的可视范围与可达层级,让动线编排从主观推敲转向可被复盘的几何依据。
(C04) 影像
影像
用 D5 渲染器输出沉浸式漫游,在无人机巡航与人类步行之间切换镜头节奏,作为方案对外叙述的主影像。
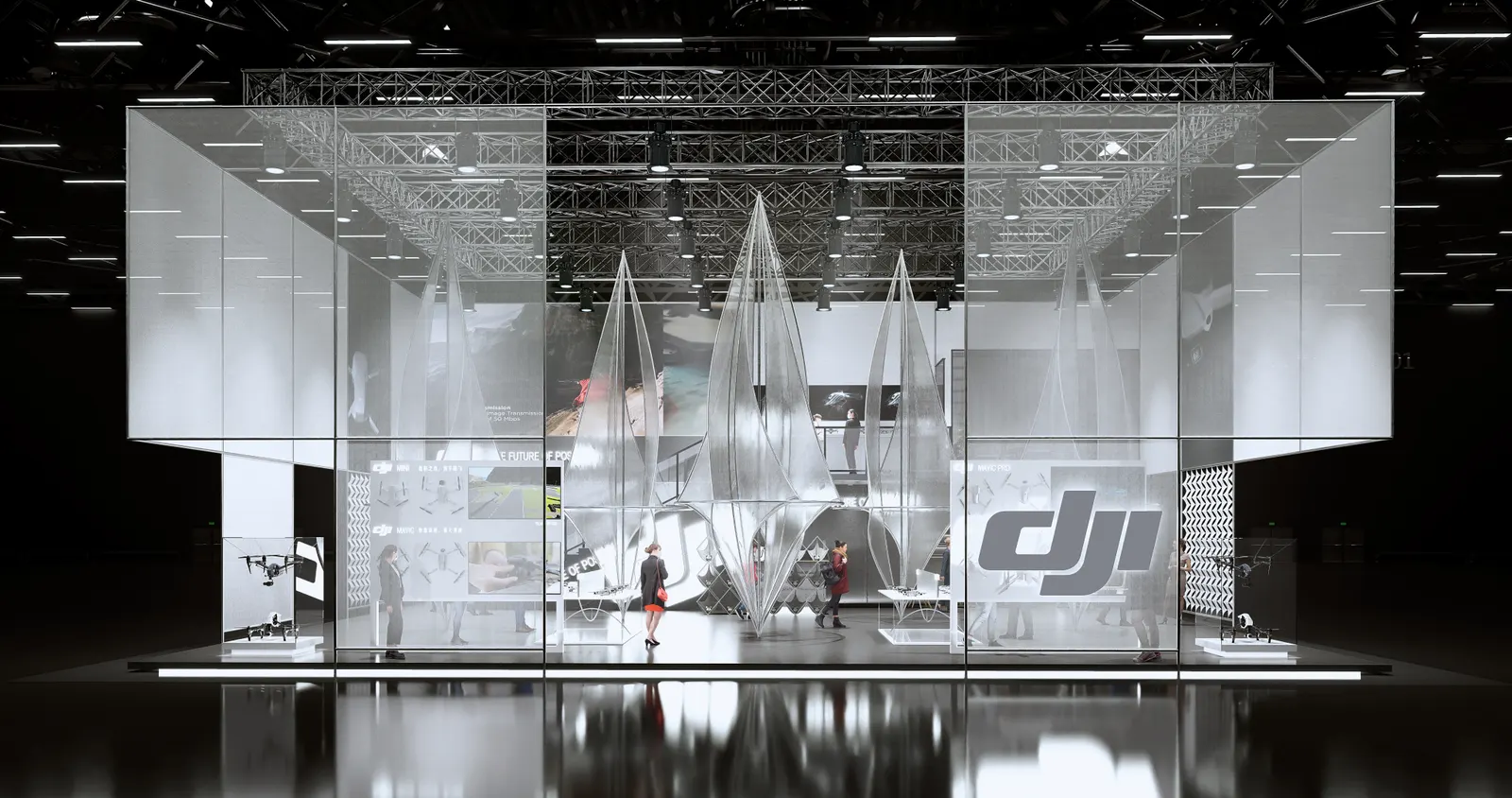
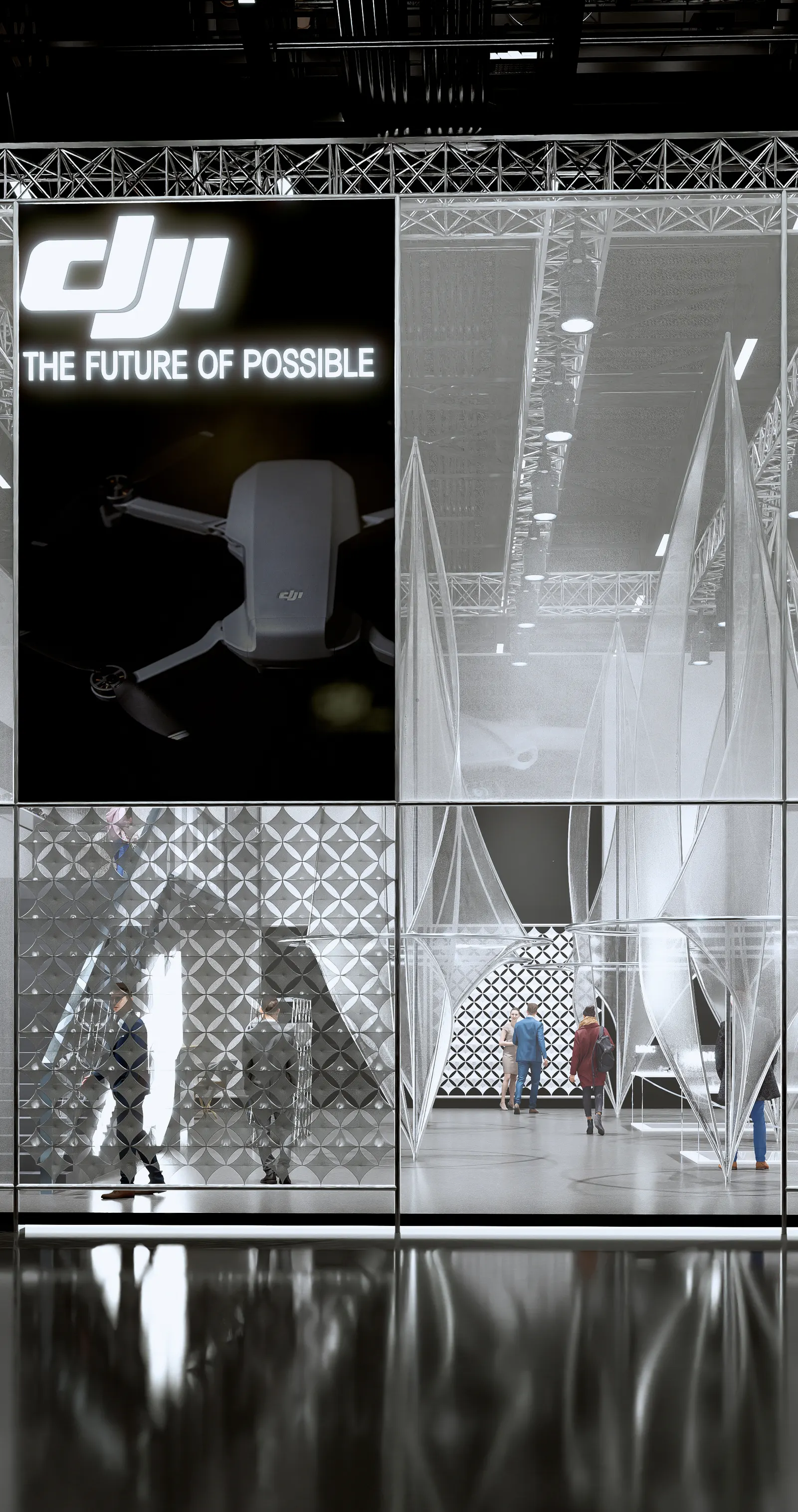
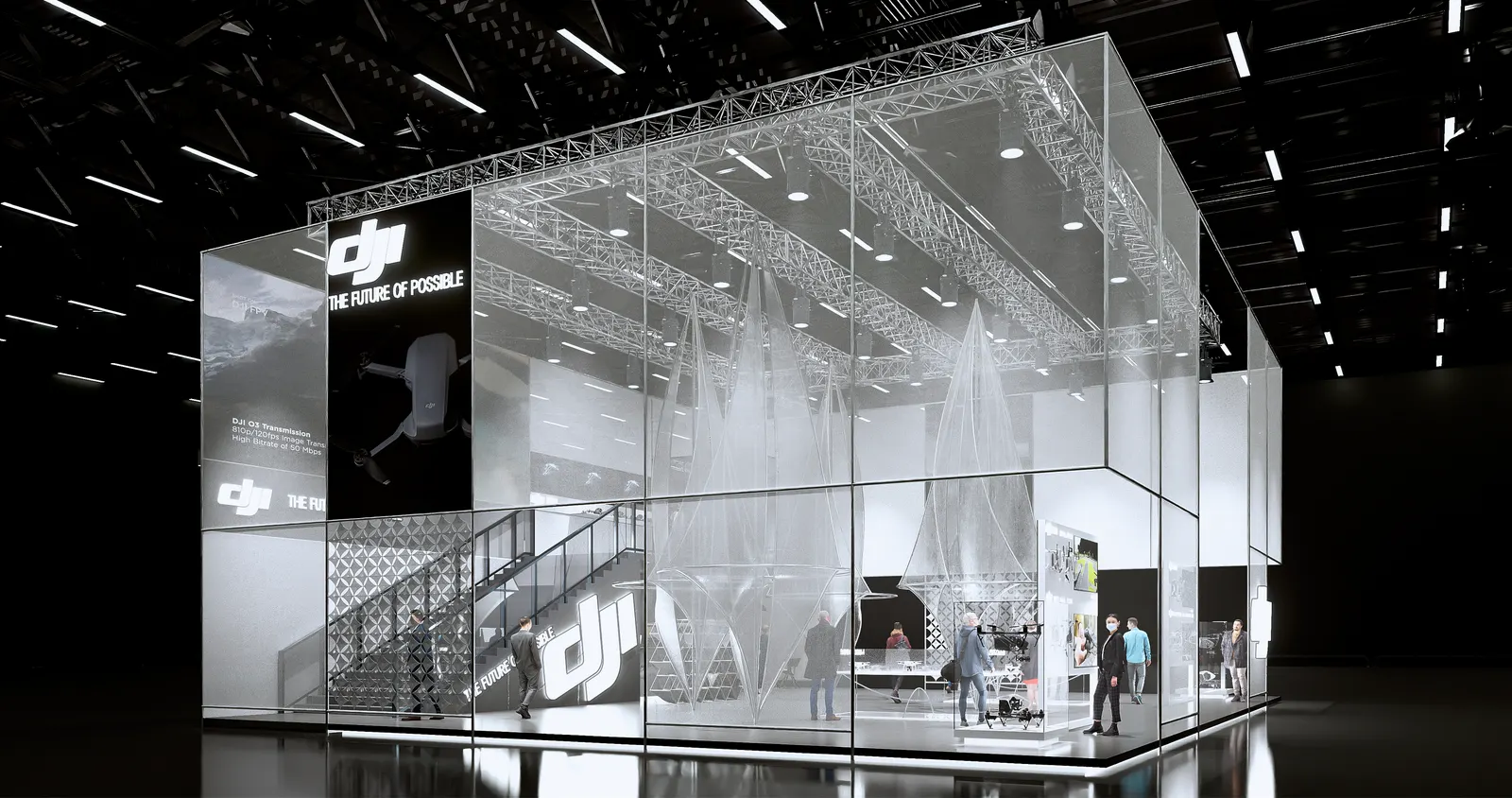
(D) 效果图
高分辨率渲染图。点击在新标签页打开原图,便于细看材质、灯光与空间关系。





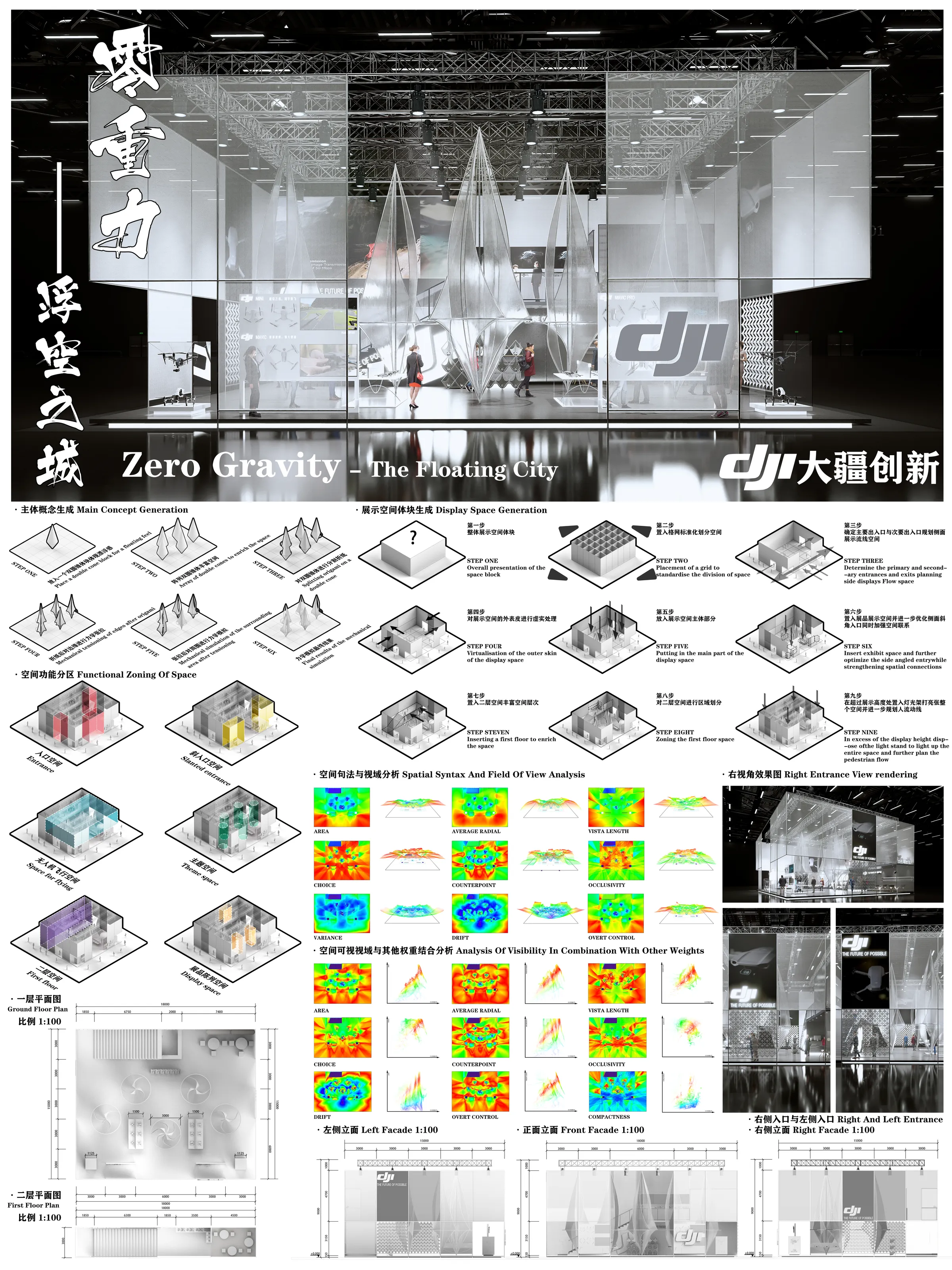
(E) 展板版面
排版与图集。点击查看高分辨率原图。